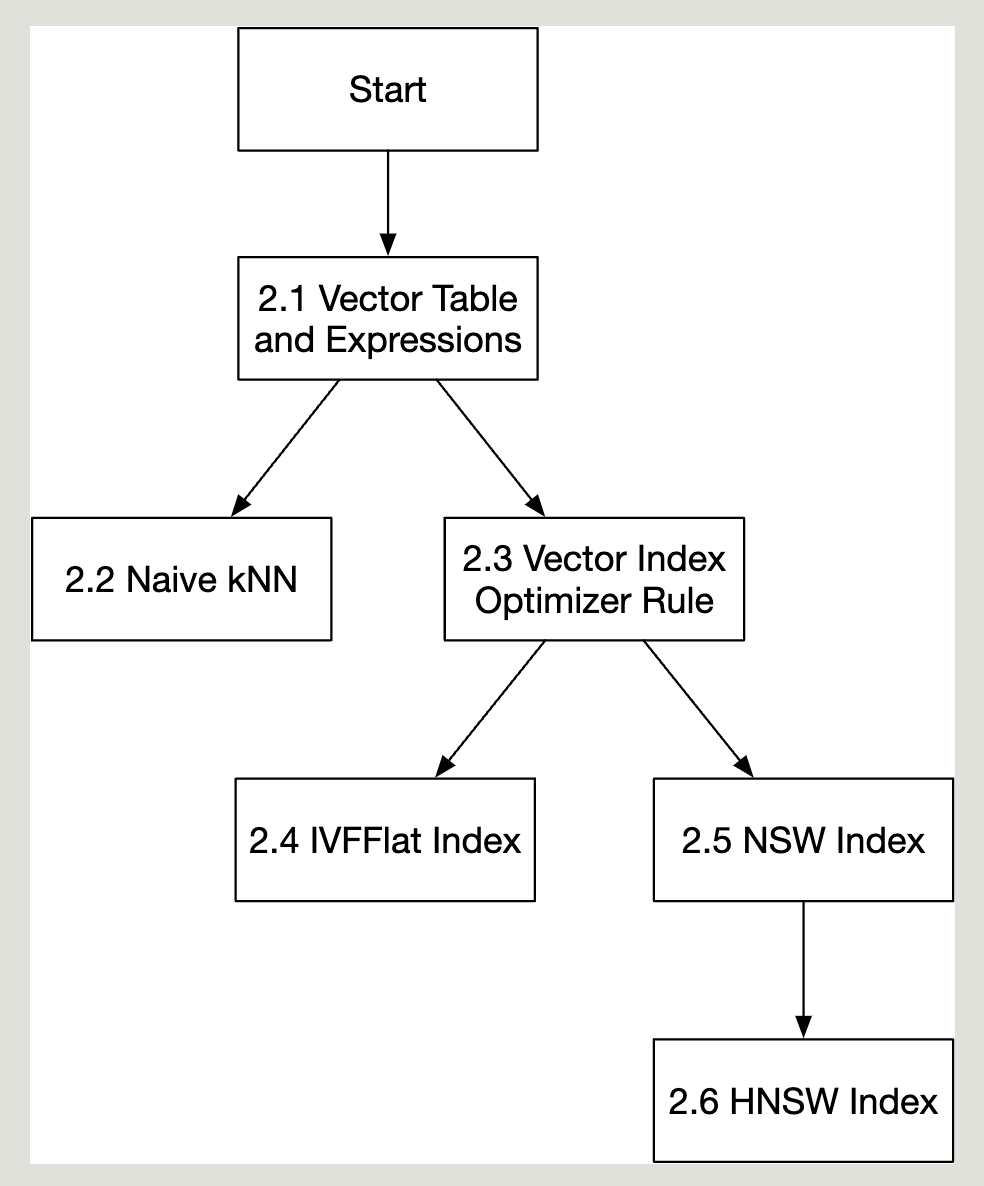
这是一个基于BusTub实现向量拓展的教程,支持向量数据类型以及相关的优化。根据这篇博客 实现,具体流程如下:
向量数据库介绍 向量就可以理解为c++中的vector,比如[1, 2, 3]。
而原版的Bustub(或者传统关系型数据库)会有多种数据类型,比如int,float,varchar….
而向量数据库就是对其新增加一个数据类型,vector 。
例如,在支持向量类型的数据库中,可以这样定义和插入数据:
1 2 3 4 5 6 create table embeddings ( id primary key, embedding vector(3 ) ); insert into embeddings (embedding) values ('[1.0, 2.0, 3.0]' );
这就建立一个vector数据类型embedding,embedding 是一列,类型为 vector(3),表示一个包含 3 个浮点数的向量。可以往里插入值 **[1.0, 2.0, 3.0]**。
如果使用传统的关系型数据库 schema,通常需要这样展开成多列:
1 2 3 4 5 6 7 8 create table embeddings ( id primary key, v1 float , v2 float , v3 float ); insert into embeddings values (1.0 , 2.0 , 3.0 );
换句话说,向量数据类型就是把原本的三个float数据类型的列合并封装成一个数据类型vector整体。
乍一看这貌似没啥特别的,不就新增一个数据类型吗?,三列还是一列似乎区别不大,用得把整个数据库都改名成”向量“数据库吗?
而事实不止于此,向量数据库的核心是,对向量这个数据类型相关的操作进行大量的优化,极大提升向量操作的效率。
比如:
统一的向量数据模型 :向量作为一个整体存储和管理,支持高维数据。高效的向量运算 :原生支持向量间的相似度计算(L2距离、余弦相似度、内积等)。专用的向量索引结构 :如 IVFFlat、HNSW、DiskANN 等,使得向量检索在百万到亿级规模的数据中依然可以快速响应。更好的存储布局 :连续内存存储向量,提高了访问局部性和 CPU cache 命中率。
不仅是新增了一个vector数据类型,更是从数据组织、查询优化、索引加速等各个方面,为处理大规模高维向量数据进行了深度定制。
随着机器学习、推荐系统、检索系统的发展,对高效向量检索的需求不断增加,向量数据库已经成为支撑这些应用的重要基础设施。
一句话总结: 向量数据库就是支持vector数据类型,并在此基础上对vector类型相关操作进行极大的优化。
所以让bustub支持向量化思路也很清晰了,先支持新的向量数据库类型(这个容易),再一步步对有关向量的操作进行优化。
环境配置 教程建议clone新的repo,但我是直接基于我之前完成的四个project,截止目前这个分支只有七个新commit,所以建议直接一个个commit用 git cherry-pick来一步步同步,这样也可以清楚新增加了哪些东西。
本地增加对方为远程repo:
1 git remote add vectordb git@github.com:skyzh/bustub-vectordb.git
然后拉远程库的分支
然后即可看到对方分支
查看你想合并的分支(main)
1 git checkout -b merge-vectordb vectordb/main
这会在本地建立一个分支merge-vectordb,指向 vectordb/vectorized。
本地新建一个专门用来实现矢量化的分支
1 git switch -c feature/vectordb
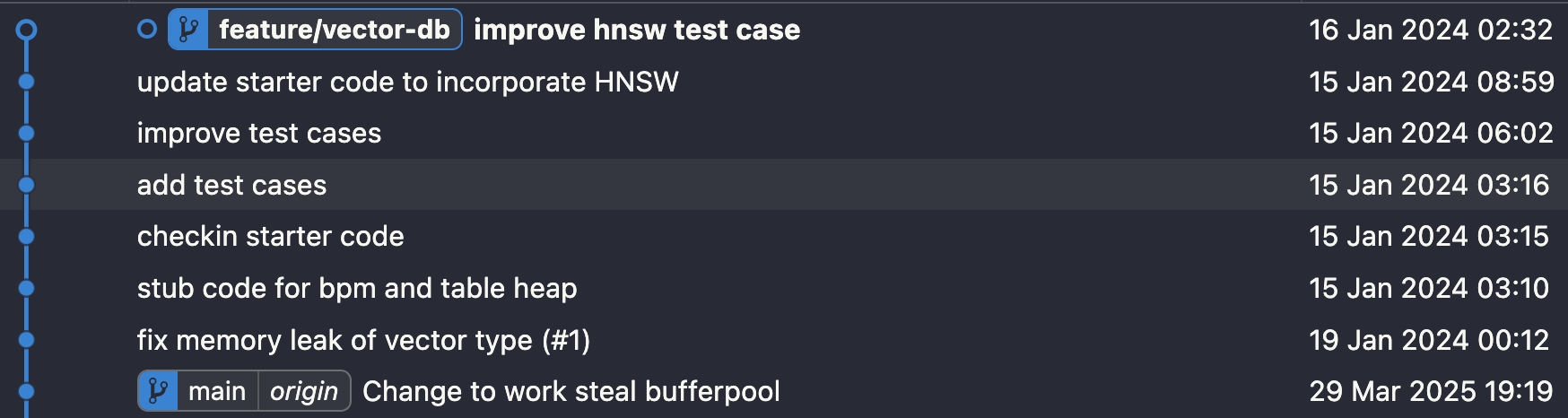
然后就可以一步步用cherry-pick合并,在本地或者github都可以找到fork之后的七个新commit,github上看会清晰很多,比如合并第一个message为“stub code for bpm and table heap”的commit:
1 git cherry-pick cc270104687b2f673f26c9490642140ef0fe491f
然后根据自己的实现解决conflict再合并下一个即可。最后git graph类似:
然后就可以编译运行:
1 2 3 cmake -B build cd build make -j10 shell sqllogictest
编译了bustub shell, 就可以运行创建向量命令了:
1 2 3 4 5 6 7 8 9 10 ❯ ./bin/bustub-shell Welcome to the BusTub shell! Type \help to learn more. bustub> select array [1.0, 2.0, 3.0];+-------------+ | __unnamed#0 | +-------------+ | [1,2,3] | +-------------+ bustub>
Insertion & Sequential Scan vector_expression.h 中补齐几个基本的向量运算:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 inline auto InnerProduct (const std::vector<double > &left, const std::vector<double > &right) -> double double ip = 0.0 ; for (size_t i = 0 ; i < left.size (); ++i) { ip += left[i] * right[i]; } return ip; } inline auto VectorNorm (const std::vector<double > &v) -> double double norm = 0.0 ; for (double x : v) { norm += std::pow (x, 2 ); } return std::pow (norm, 0.5 ); } inline auto ClampNearZero (double number) -> double return std::abs (number) < 1e-8 ? 0.0 : number; } inline auto ComputeDistance (const std::vector<double > &left, const std::vector<double > &right, VectorExpressionType dist_fn) auto sz = left.size (); BUSTUB_ASSERT (sz == right.size (), "vector length mismatched!" ); switch (dist_fn) { case VectorExpressionType::L2Dist: { double l2d = 0.0 ; for (size_t i = 0 ; i < sz; ++i) { l2d += std::pow (left[i] - right[i], 2 ); } return ClampNearZero (std::pow (l2d, 0.5 )); } case VectorExpressionType::InnerProduct: { return ClampNearZero (- InnerProduct (left, right)); } case VectorExpressionType::CosineSimilarity: { double norm_left = VectorNorm (left); double norm_right = VectorNorm (right); if (norm_left == 0 || norm_right == 0 ) { return 1.0 ; } return ClampNearZero (1.0 - InnerProduct (left, right) / (norm_left * norm_right)); } default : BUSTUB_ASSERT (false , "Unsupported vector expr type." ); } }
只要merge正确,那么此时你之前实现的insertion_executor和seq_scan_executor都可以使用。运行
1 ./bin/bustub-sqllogictest ../test/sql/vector.01-insert-scan.slt --verbose
即可通过测试。
而这里新增了一个Vector_Index_Scan_Executor , 就是利用向量索引进行扫描的执行器,应该是已经帮你实现好了,只不过不支持MVCC。
Naive K-Nearest Neighbors 且看这句sql:
1 2 CREATE TABLE t1(v1 VECTOR(3), v2 integer ); SELECT v1 FROM t1 ORDER BY ARRAY [1.0, 1.0, 1.0] <-> v1 LIMIT 3;
这就是试图寻找表t1中距离ARRAY [1.0, 1.0, 1.0] 最近的三个vector。
Naive KNN 在向量数据库里指的是一种最基础的最近邻搜索方法 ,特点是:
遍历 所有数据点(Brute Force)计算查询向量到每个数据点的距离
取距离最近的前K个
也就是说,不管数据库里有多少个向量,每次查询都会全量扫描一遍。
由于之前实现过sort,limit,topN,这里仍然不需要任何更改,直接可以通过测试。(怎么感觉啥也没干。。。)
1 2 make -j8 sqllogictest ./bin/bustub-sqllogictest ../test/sql/vector.02-naive-knn.slt --verbose
Matching the Plan Structure 正如我最开始将的逻辑,先支持了向量数据类型的操作,紧接着就是对其相关操作进行优化了。
如果数据库里有几百万、上亿个 向量,你想找“跟查询向量最接近的K个 ”,每次都暴力扫一遍所有向量,就会非常慢。这时候,就需要一种特殊的索引结构,能对向量距离计算 极大加速。
Vector Index Scan Plan 介绍 接下来实现对vector进行索引扫描,实现一个新的优化器规则,将seq_scan 优化成Vector Index Scan 。
需要的结果大概是:
1 2 3 4 5 EXPLAIN (o) SELECT v1 FROM t1 ORDER BY ARRAY [1.0, 1.0, 1.0] <-> v1 LIMIT 2; === OPTIMIZER === TopN { n=2, order_bys=[("Default", "l2_dist([1.000000,1.000000,1.000000], #0.0)")]} Projection { exprs=["#0.0"] } SeqScan { table=t1 }
优化后:
1 2 3 4 5 EXPLAIN (o) SELECT v1 FROM t1 ORDER BY ARRAY [1.0, 1.0, 1.0] <-> v1 LIMIT 2; === OPTIMIZER === Projection { exprs=["#0.0"] } VectorIndexScan { index_oid=1, index_name=t1v1hnsw, table_oid=24, table_name=t1 base_vector=[1.000000,1.000000,1.000000], limit=2 }
即将TopN 节点和SeqScan 节点合并成VectorIndexScan 节点。利用TopN中的距离函数走对应索引,直接扫描两个tuple即可而不用全表扫描,极大提升效率。
但TopN和SeqScan不一定是挨着的,这俩节点之间的位置有三种基本情况:
Case 1:TopN和SeqScan紧挨着
1 2 TopN { n=2, order_bys=[("Default", "l2_dist([1.000000,1.000000,1.000000], #0.0)")]} SeqScan { table=t1 }
最简单的情况。
Case 2: TopN紧接着一个Projection
1 2 3 TopN { n=2, order_bys=[("Default", "l2_dist([1.000000,1.000000,1.000000], #0.0)")]} Projection { exprs=["#0.0", "l2_dist([1.000000,1.000000,1.000000], #0.0)"] } SeqScan { table=t1 }
Case 3:TopN紧接着一个Projection且其改变了列的顺序
1 2 3 TopN { n=2, order_bys=[("Default", "l2_dist([1.000000,1.000000,1.000000], #0.1)")]} Projection { exprs=["#0.1", "#0.0"] } SeqScan { table=t1 }
总而言之,就是遇到这样的结构就可以尝试优化成VectorIndexScan:
1 2 3 4 5 TopN | Projection (optional) | seq_scan
因为之前实现了 Predicate Pushdown 和 合并filter&SeqScan ,所以应该没有遗漏情况。
于是逻辑就很清晰了,跟之前Project3部分的差不多,从上往下遍历PlanTree,直到遇到TopN - Projection(可有可无)- seq_scan 的节点子树即可尝试优化。
从TopN的order_bys 条件中提取向量距离表达式 (比如l2_dist)。从TopN中获取向量在tuple中的col_idx , 如果经过projection节点,检查其是否改变了col_idx 。
Vector Index Scan Plan 优化实现 绝大部分只需改动 vector_index_scan.cpp 。
先实现一个helper function,用于寻找匹配的vector index。其可根据条件,搜索一个table是否有可以使用的vector index,有的话返回index,否则返回nullptr。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 auto MatchVectorIndex (const Catalog &catalog, table_oid_t table_oid, uint32_t col_idx, VectorExpressionType dist_fn, const std::string &vector_index_match_method) -> const IndexInfo * if (vector_index_match_method == "none" ) { return nullptr ; } const auto table_info_ptr = catalog.GetTable (table_oid); if (table_info_ptr == nullptr ) { return nullptr ; } auto index_infos = catalog.GetTableIndexes (table_info_ptr->name_); for (const auto idx_info : index_infos) { if (idx_info == nullptr ) { continue ; } if (idx_info->index_->GetIndexColumnCount () != 1 || idx_info->index_->GetKeyAttrs ()[0 ] != col_idx) { continue ; } const auto vector_index = dynamic_cast <VectorIndex *>(idx_info->index_.get ()); if (vector_index != nullptr && vector_index->distance_fn_ == dist_fn) { if (vector_index_match_method.empty () || vector_index_match_method == "unset" ) { return idx_info; } if (vector_index_match_method == "hnsw" && dynamic_cast <const HNSWIndex *>(vector_index) != nullptr ) { return idx_info; } if (vector_index_match_method == "ivfflat" && dynamic_cast <const IVFFlatIndex *>(vector_index) != nullptr ) { return idx_info; } } } return nullptr ; }
然后先实现 Case1 的情况,即 TopN - SeqScan
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 auto Optimizer::OptimizeAsVectorIndexScan (const AbstractPlanNodeRef &plan) -> AbstractPlanNodeRef std::vector<AbstractPlanNodeRef> children; for (const auto &child : plan->GetChildren ()) { children.emplace_back (OptimizeAsVectorIndexScan (child)); } auto optimized_plan = plan->CloneWithChildren (std::move (children)); if (optimized_plan->GetType () != PlanType::TopN) { return optimized_plan; } auto topn_plan = dynamic_cast <TopNPlanNode &>(*optimized_plan); auto order_bys = topn_plan.GetOrderBy (); if (order_bys.size () != 1 ) { return optimized_plan; } VectorExpressionType vector_expr_type = VectorExpressionType::UnKnown; std::shared_ptr<const ArrayExpression> base_vector; uint32_t col_idx = -1U ; if (!ExtractVectorScanParams (order_bys[0 ], vector_expr_type, base_vector, col_idx)) { return optimized_plan; } auto cur_plan = topn_plan.GetChildPlan (); if (cur_plan->GetType () == PlanType::Projection) { return optimized_plan; } if (cur_plan->GetType () == PlanType::SeqScan) { auto &seq_scan_plan = dynamic_cast <const SeqScanPlanNode &>(*cur_plan); const auto index_info = MatchVectorIndex (catalog_, seq_scan_plan.GetTableOid (), col_idx, vector_expr_type, vector_index_match_method_); if (index_info == nullptr ) { return optimized_plan; } auto vector_indexscan_plan = std::make_shared <VectorIndexScanPlanNode>(topn_plan.output_schema_, seq_scan_plan.GetTableOid (), seq_scan_plan.table_name_, index_info->index_oid_, index_info->index_->GetName (), base_vector,topn_plan.GetN ()); return vector_indexscan_plan; } return optimized_plan; }
可以看到我目前只考虑了最简单的情况,即TopN中的order_bys只有一个pair。也不考虑prediction。
我把从一个order_by对中提取构造信息的功能封装成单独的函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 static auto ExtractVectorScanParams (const std::pair<OrderByType, AbstractExpressionRef> &order_by, VectorExpressionType &vector_expr_type, std::shared_ptr<const ArrayExpression> &base_vector, uint32_t &col_idx) -> bool if (order_by.first != OrderByType::DEFAULT && order_by.first != OrderByType::ASC) { return false ; } const auto vector_expr = dynamic_cast <const VectorExpression *>(order_by.second.get ()); if (vector_expr == nullptr ) { return false ; } vector_expr_type = vector_expr->expr_type_; auto left = dynamic_cast <const ArrayExpression *>(vector_expr->GetChildAt (0 ).get ()); auto left_col_expr = dynamic_cast <const ColumnValueExpression *>(vector_expr->GetChildAt (0 ).get ()); auto right = dynamic_cast <const ArrayExpression *>(vector_expr->GetChildAt (1 ).get ()); auto right_col_expr = dynamic_cast <const ColumnValueExpression *>(vector_expr->GetChildAt (1 ).get ()); if (left != nullptr && right_col_expr != nullptr ) { base_vector = std::dynamic_pointer_cast <const ArrayExpression>( std::shared_ptr <AbstractExpression>(left->CloneWithChildren (left->GetChildren ())) ); col_idx = right_col_expr->GetColIdx (); } else if (right != nullptr && left_col_expr != nullptr ) { base_vector = std::dynamic_pointer_cast <const ArrayExpression>( std::shared_ptr <AbstractExpression>(right->CloneWithChildren (right->GetChildren ())) ); col_idx = left_col_expr->GetColIdx (); } else { return false ; } return true ; }
此时,即可对Case1 情况进行优化。
1 2 3 4 5 6 <main>:13 EXPLAIN (o) SELECT * FROM t1 ORDER BY ARRAY [1.0, 1.0, 1.0] <-> v1 LIMIT 2; ---- === OPTIMIZER === VectorIndexScan { index_oid=1, index_name=t1v1hnsw, table_oid=24, table_name=t1 base_vector=[1.000000,1.000000,1.000000], limit=2 }
接下来实现Case2 ,在我已经留下的位置补上Projection相关操作即可:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 ... ... AbstractPlanNodeRef projection_node = nullptr ; auto cur_plan = topn_plan.GetChildPlan (); if (cur_plan->GetType () == PlanType::Projection) { auto projection_plan = dynamic_cast <const ProjectionPlanNode *>(cur_plan.get ()); projection_node = cur_plan; cur_plan = projection_plan->GetChildPlan (); } ... ... if (projection_node != nullptr ) { return projection_node->CloneWithChildren ({vector_indexscan_plan}); } return vector_indexscan_plan; ... ...
即可优化Case2 的情况:
1 2 3 4 5 6 7 8 9 10 11 12 13 <main>:10 EXPLAIN (o) SELECT v1 FROM t1 ORDER BY ARRAY [1.0, 1.0, 1.0] <-> v1 LIMIT 2; ---- === OPTIMIZER === Projection { exprs=["#0.0"] } VectorIndexScan { index_oid=1, index_name=t1v1hnsw, table_oid=24, table_name=t1 base_vector=[1.000000,1.000000,1.000000], limit=2 } <main>:16 EXPLAIN (o) SELECT v1, ARRAY [1.0, 1.0, 1.0] <-> v1 FROM t1 ORDER BY ARRAY [1.0, 1.0, 1.0] <-> v1 LIMIT 2; ---- === OPTIMIZER === Projection { exprs=["#0.0", "l2_dist([1.000000,1.000000,1.000000], #0.0)"] } VectorIndexScan { index_oid=1, index_name=t1v1hnsw, table_oid=24, table_name=t1 base_vector=[1.000000,1.000000,1.000000], limit=2 }
而最难的case3 :
1 2 3 4 5 6 7 <main>:19 EXPLAIN (o) SELECT v2, v1 FROM t1 ORDER BY ARRAY [1.0, 1.0, 1.0] <-> v1 LIMIT 2; ---- === OPTIMIZER === TopN { n=2, order_bys=[("Default", "l2_dist([1.000000,1.000000,1.000000], #0.1)")]} Projection { exprs=["#0.1", "#0.0"] } SeqScan { table=t1 }
目前无法优化。
因为可以看到,从TopN中可以锁定col_idx为1 ,而Projection节点重新映射col_idx成0 ,所以在seq_scan中实际需要寻找的是col_idx=0对应列的索引 ,而根据我目前的实现,仍然找的是col_idx=1对应的索引 。而col_idx=1的列根本不是Vector,所以MatchVectorIndex 函数自然找不到匹配的索引,所以就会返回nullptr而无法优化。
所以我们要做的就是在 Projection layer 中查看是否需要重新映射col_idx 。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 if (cur_plan->GetType () == PlanType::Projection) { projection_node = cur_plan; auto projection_plan = dynamic_cast <const ProjectionPlanNode *>(cur_plan.get ()); cur_plan = projection_plan->GetChildPlan (); BUSTUB_ASSERT (col_idx < projection_plan->GetExpressions ().size (), "col_idx greater than projection." ); auto col_proj_expr = projection_plan->GetExpressions ()[col_idx]; auto col_column_value_expr = dynamic_cast <ColumnValueExpression *>(col_proj_expr.get ()); if (col_column_value_expr == nullptr ) { return optimized_plan; } col_idx = col_column_value_expr->GetColIdx (); }
增加re-map后,即可通过所有测试:
1 /bin/bustub-sqllogictest ../test/sql/vector.03-index-selection.slt --verbose
Bonus 这个部分的bonus也很容易实现,
1 2 3 4 5 EXPLAIN (o) SELECT * FROM (SELECT v1, ARRAY [1.0, 1.0, 1.0] <-> v1 as distance FROM t1) ORDER BY distance LIMIT 2; TopN { n=2, order_bys=[("Default", "#0.1")]} Projection { exprs=["#0.0", "l2_dist([1.000000,1.000000,1.000000], #0.0)"] } SeqScan { table=t1 }
目前无法得到优化。因为我目前只在TopN中找满足条件的Vector Expression,但这个sql语句中vector expression 放在了Projection中 ,所以只需要在上面代码 projection layer 加入寻找vector expression的功能即可。
再拆出一层封装函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 static auto ExtractVectorScanFromOrderBy (const std::pair<OrderByType, AbstractExpressionRef> &order_by, VectorExpressionType &vector_expr_type, std::shared_ptr<const ArrayExpression> &base_vector, uint32_t &col_idx) -> bool if (order_by.first != OrderByType::DEFAULT && order_by.first != OrderByType::ASC) { return false ; } return ExtractVectorScanFromAbsExpr (order_by.second, vector_expr_type, base_vector, col_idx); } static auto ExtractVectorScanFromAbsExpr (const AbstractExpressionRef &expr, VectorExpressionType &vector_expr_type, std::shared_ptr<const ArrayExpression> &base_vector, uint32_t &col_idx) -> bool const auto vector_expr = dynamic_cast <const VectorExpression *>(expr.get ()); if (vector_expr == nullptr ) { return false ; } vector_expr_type = vector_expr->expr_type_; auto left = dynamic_cast <const ArrayExpression *>(vector_expr->GetChildAt (0 ).get ()); auto left_col_expr = dynamic_cast <const ColumnValueExpression *>(vector_expr->GetChildAt (0 ).get ()); auto right = dynamic_cast <const ArrayExpression *>(vector_expr->GetChildAt (1 ).get ()); auto right_col_expr = dynamic_cast <const ColumnValueExpression *>(vector_expr->GetChildAt (1 ).get ()); if (left != nullptr && right_col_expr != nullptr ) { base_vector = std::dynamic_pointer_cast <const ArrayExpression>( std::shared_ptr <AbstractExpression>(left->CloneWithChildren (left->GetChildren ())) ); col_idx = right_col_expr->GetColIdx (); } else if (right != nullptr && left_col_expr != nullptr ) { base_vector = std::dynamic_pointer_cast <const ArrayExpression>( std::shared_ptr <AbstractExpression>(right->CloneWithChildren (right->GetChildren ())) ); col_idx = left_col_expr->GetColIdx (); } else { return false ; } return true ; }
增加并修改Projection Layer代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 ... ... if (cur_plan->GetType () == PlanType::Projection) { projection_node = cur_plan; auto projection_plan = dynamic_cast <const ProjectionPlanNode *>(cur_plan.get ()); cur_plan = projection_plan->GetChildPlan (); auto proj_exprs = projection_plan->GetExpressions (); if (col_idx == -1U ) { for (const auto &expr : proj_exprs) { auto ve = dynamic_cast <VectorExpression *>(expr.get ()); if (ve != nullptr && !ExtractVectorScanFromAbsExpr (expr, vector_expr_type, base_vector, col_idx)) { break ; } } } else { BUSTUB_ASSERT (col_idx < projection_plan->GetExpressions ().size (), "col_idx greater than projection." ); auto col_proj_expr = proj_exprs[col_idx]; auto col_column_value_expr = dynamic_cast <ColumnValueExpression *>(col_proj_expr.get ()); if (col_column_value_expr == nullptr ) { return optimized_plan; } col_idx = col_column_value_expr->GetColIdx (); } } if (col_idx == -1U ) { return optimized_plan; } ... ...
在测试文件最下面增加语句:
1 2 3 4 5 statement ok set vector_index_method= unsetstatement ok EXPLAIN (o) SELECT * FROM (SELECT v1, ARRAY [1.0 , 1.0 , 1.0 ] < - > v1 as distance FROM t1) ORDER BY distance LIMIT 2 ;
运行可看到,成功优化Bonus:
1 2 3 4 5 6 <main>:43 EXPLAIN (o) SELECT * FROM (SELECT v1, ARRAY [1.0, 1.0, 1.0] <-> v1 as distance FROM t1) ORDER BY distance LIMIT 2; ---- === OPTIMIZER === Projection { exprs=["#0.0", "l2_dist([1.000000,1.000000,1.000000], #0.0)"] } VectorIndexScan { index_oid=1, index_name=t1v1hnsw, table_oid=24, table_name=t1 base_vector=[1.000000,1.000000,1.000000], limit=2 }
目前就实现了在优化器中将seq_scan优化成VectorIndexScan ,后续就可实现向量索引的具体算法了。经过前面Project 3 Leaderboard部分的锤炼,这部分实现新的优化器规则还是毫无压力的,但给的测试也实在不全面,我目前也没检查edge cases,遇到问题再改吧,但更改后不一定会贴出来了。
Inverted File Flat Index 现在实现了优化器中将 PlanTreeNode 优化成利用向量索引扫描的 VectorIndexScan,从这里开始,我们就要开始实现向量索引的具体算法,实现对向量距离操作的加速优化。
这一部分,是实现Inverted File Flat Index 。
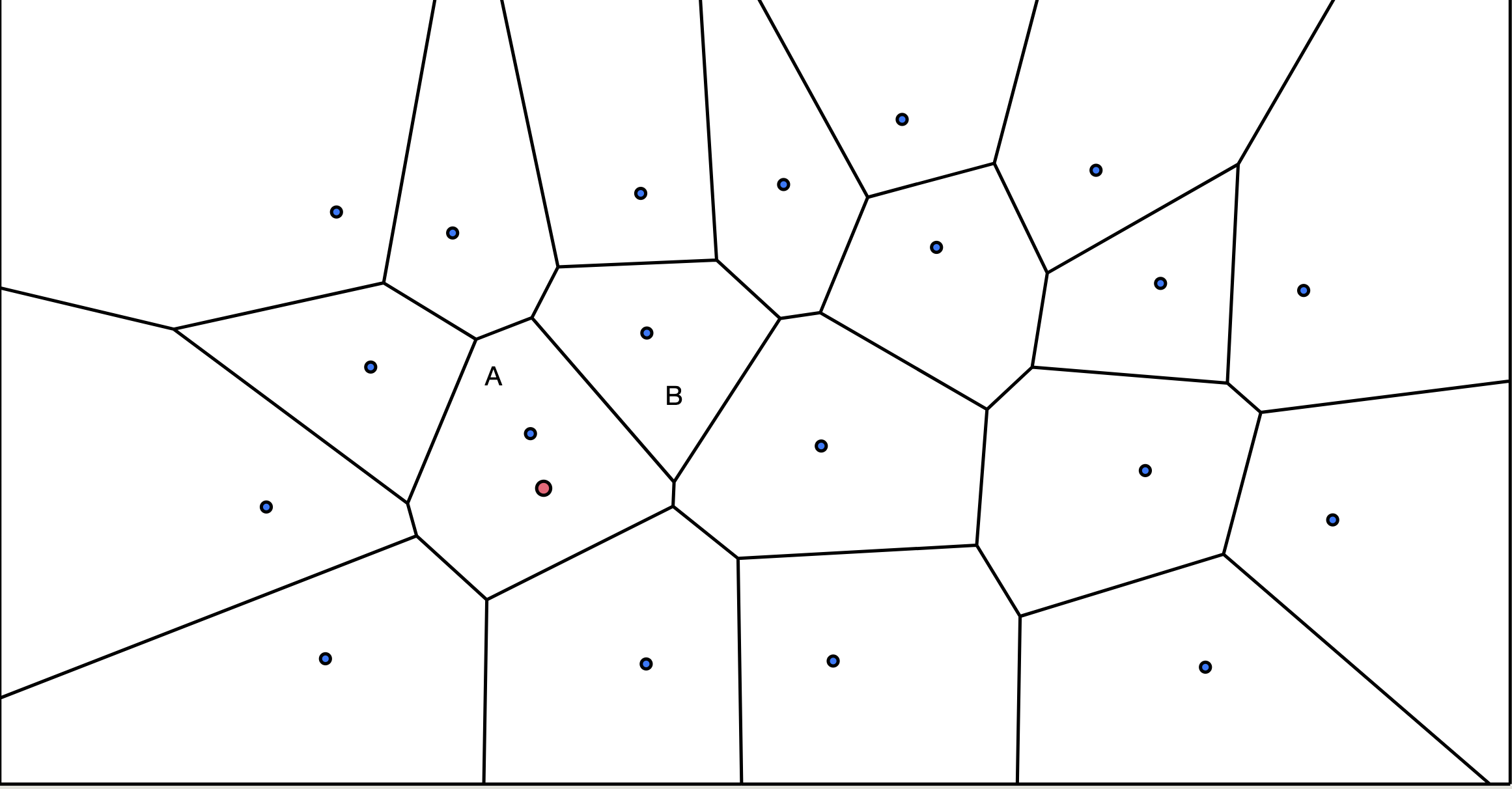
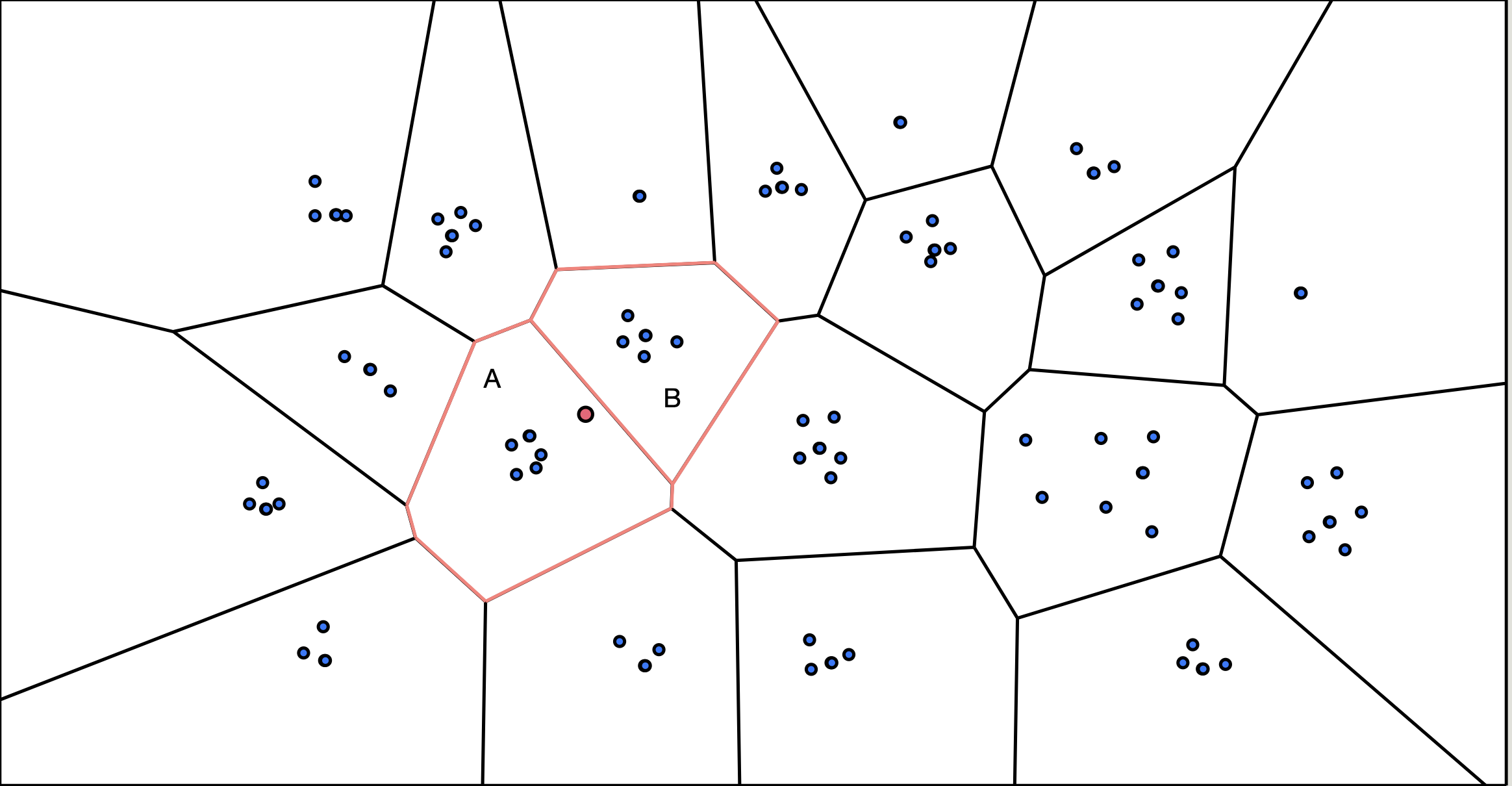
思路 IVFFlat 的基本思路是:先使用聚类(如 K-means)将数据点划分为多个cluster,每个cluster由其“质心”代表。这样,向量空间被划分成多个以cluster质心为界的格子。插入新数据时,只需将它归入其所在格子的簇中。查询时,只在距离查询向量最近的几个cluster中 进行精确搜索,跳过大量无关向量,从而在牺牲部分精度的同时,大幅提高搜索效率。
这也是一种轻量级 的向量索引,构建快,占用内存少,但是查找精度不足。
两个相邻“质心”连线的垂直平分线 ,即保证边界线上的点到左右两个格子质心距离都相等,有点像固体物理的晶格。 并且因为开销过大,每个格子的质心是不会随着数据插入而动态调整的,只会在构建时就确定。这也是该算法的缺点之一。同时因为查找最近邻几个cluster,所以查找精确度非常依赖数据的聚簇性。
具体流程 聚类(训练阶段) 用 K-Means 将所有向量划分为 nlist 个簇。
K-Means 算法目标和数学表达 K-Means 是一种无监督聚类算法,目标是将数据划分为 k 个簇(cluster),使得:每个簇内的样本尽量相似,簇与簇之间尽量不同。 它通过最小化簇内平方误差(Within-Cluster Sum of Squares, WCSS) 来优化聚类效果。
给定数据集:
$$
我们要找到 $k$ 个质心(centroids):
$$
目标是最小化以下损失函数(簇内平方和误差,Within-Cluster Sum of Squares, WCSS ):
$$
表达还是很清晰的,上述最小化损失函数翻译成人话就是:通过调整质心,使计算每个数据点到各自最近的质心的距离,再把这些距离加起来,让这个加起来距离和最小,这样质心的选择就是最精确的。 (不过因为开方运算计算量太大,而且开不开方没意义,所以这个“距离 “其实是距离的平方 ,节省一个开方的计算量)
K-Means 算法流程 Step1 初始化中心点 :cluster初始质心点。
Step 2: 迭代直到收敛 :
(1) 分配
(2) 更新
重新计算分配数据点之后的每个中心点为其簇中所有点的均值:
(3) 收敛条件
不断重复(1)(2),直到
中心不再变化(误差变化小于阈值)
迭代次数达到上限
K-Means++ 以上传统k-means算法的瓶颈则是在随机初始化中心点,很容易使最开始的中心点过于集中,从而浪费大量迭代次数于分散中心点。
于是k-means++ 用了一种更好的初始化中心点方式。
流程:(现在要选择第二个中心) 越远越可能被选中 。(已经选择完了第二个中心)
→ 这样做可以防止所有中心点聚在一起,虽然仍然是随机,但大幅提高较远点被选为中心的概率 ,提高聚类稳定性和收敛速度。
举个简单例子:
假设我们有 4 个点:
点 A 距当前中心距离为 1
点 B 距离为 2
点 C 距离为 3
点 D 距离为 4
我们计算每个点的 $D(x)^2$:
点
距离 D(x)
距离平方 D(x)^2
选中概率
A
1
1
1 / 30
B
2
4
4 / 30
C
3
9
9 / 30
D
4
16
16 / 30
→ 最有可能被选为新中心的是 D,其次是 C。
构建倒排表(索引阶段) 已经构建出了k个cluster中心点,现在遍历所有数据点向量,找到其最近的中心点,加入中心点对应的cluster 倒排表 中:
1 2 3 for each vector x: c = find_nearest_centroid (x, centroids) inverted_lists[c].append ({id: x.id, vector: x})
每个倒排表就是一个 cluster 中的“原始向量表”。
查询流程(ANN 搜索) 搜索流程包括两个阶段:
1. 选出 nprobe 个最近中心点(coarse search)
1 nearest_centroids = top_k_by_distance (query, centroids, k=nprobe)
这一步成本是 $\mathcal{O}(nlist \times (dim + \log nprobe))$ ,即遍历每个中心点并计算距离。一般nprobe很小,所以成本可近似 $\mathcal{O}(nlist × dim)$ 。但由于 nlist 通常较小(如 100~1000),速度较快。
2. 在选中的倒排表中精排(fine search)
1 2 3 4 5 6 7 candidates = [] for c in nearest_centroids: for entry in inverted_lists[c]: dist = distance (query, entry.vector) candidates.append ((entry.id, dist)) return top_k (candidates)
成本为:$\mathcal{O}(nprobe \times \text{avg_list_size} \times \text{dim})$。
只需要在选出的少量近邻倒排表中做全量比对,即nprobe 、avg_list_size 都很小,故总成本远小于 brute-force。
常见参数
参数
意义
通常设置
nlist
聚类中心数量
100~1000(构建时)
nprobe
查询时探测的中心数量
1~32(运行时可调)
dim
向量维度
任意
topk
查询返回的最近邻数量
任意
实现 前面讲过的三种操作对应的API 为:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 void BuildIndex (std::vector<std::pair<std::vector<double >, RID>> initial_data) override auto ScanVectorKey (const std::vector<double > &base_vector, size_t limit) -> std::vector<RID> override void InsertVectorEntry (const std::vector<double > &key, RID rid) override
而Vector Index不支持传统 Index的API
1 2 3 4 5 6 7 8 9 10 11 auto InsertEntry (const Tuple &key, RID rid, Transaction *transaction) -> bool override UNIMPLEMENTED ("call InsertVectorEntry instead" ); } void DeleteEntry (const Tuple &key, RID rid, Transaction *transaction) override UNIMPLEMENTED ("delete from vector index is not supported" ); } void ScanKey (const Tuple &key, std::vector<RID> *result, Transaction *transaction) override UNIMPLEMENTED ("call ScanVectorKey instead" ); }
所以要修改 Insertion Executor ,改使用向量索引对应的API。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 ... ... auto &idx_info = indexes[i]; auto key_attri = idx_info->index_->GetKeyAttrs (); if (key_attri.size () == 1 && schema->GetColumn (key_attri[0 ]).GetType () == VECTOR) { auto vi = dynamic_cast <VectorIndex *>(idx_info->index_.get ()); BUSTUB_ASSERT (vi != nullptr , "Vector Key must have Vector Index." ); auto v = new_tuple.GetValue (schema, key_attri[0 ]); vi->InsertVectorEntry (v.GetVector (), *rid); } else { auto key = new_tuple.KeyFromTuple (*schema, idx_info->key_schema_, idx_info->index_->GetKeyAttrs ()); idx_info->index_->InsertEntry (key, *rid, txn); } ... ...
构建阶段有个小细节是,在迭代计算时,要处理当前centroid_bucket 为空的情况,我是直接不改变centroid。
先实现查找向量最近centroid 和 自动更新 centroids 的两个帮助函数:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 auto FindCentroid (const Vector &vec, const std::vector<Vector> ¢roids, VectorExpressionType dist_fn) -> size_t BUSTUB_ASSERT (centroids.empty () == false , "centroids cannot be empty." ); size_t nearest = -1U ; double distance = std::numeric_limits<double >::max (); for (size_t i = 0 ; i < centroids.size (); ++i) { auto d = ComputeDistance (vec, centroids[i], dist_fn); if (d < distance) { distance = d; nearest = i; } } return nearest; } auto FindCentroids (const std::vector<std::pair<Vector, RID>> &data, const std::vector<Vector> ¢roids, VectorExpressionType dist_fn) -> std::vector<Vector> if (data.empty ()) { return {}; } std::vector<std::vector<Vector>> centroids_buckets (centroids.size ()); for (auto &p : data) { centroids_buckets[FindCentroid (p.first, centroids, dist_fn)].push_back (p.first); } std::vector<Vector> new_centroids (centroids.size()) ; for (size_t i = 0 ; i < centroids_buckets.size (); ++i) { auto new_centroid = VectorAvg (centroids_buckets[i]); new_centroids[i] = new_centroid.empty () ? centroids[i] : new_centroid; } return new_centroids; }
然后就可以实现 BuildIndex :
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 void IVFFlatIndex::BuildIndex (std::vector<std::pair<Vector, RID>> initial_data) if (initial_data.empty ()) { return ; } centroids_ = RandomSample (initial_data, lists_); for (size_t i = 0 ; i < build_iteration_; ++i) { auto new_centroids = FindCentroids (initial_data, centroids_, distance_fn_); double delta = 0.0 ; for (size_t j = 0 ; j < centroids_.size (); ++j) { delta += ComputeDistance (centroids_[j], new_centroids[j], distance_fn_); } centroids_ = std::move (new_centroids); if (delta < 1e-5 ) { break ; } } centroids_buckets_.resize (centroids_.size ()); for (auto &p : initial_data) { centroids_buckets_[FindCentroid (p.first, centroids_, distance_fn_)].push_back (p); } for (auto &bucket : centroids_buckets_) { bucket.shrink_to_fit (); } }
插入新向量很简单,注意这个算法插入新向量后不需要更新centroids。
1 2 3 4 void IVFFlatIndex::InsertVectorEntry (const std::vector<double > &key, RID rid) BUSTUB_ASSERT (key.size () == centroids_.front ().size (), "Inserted vector has wrong dimension." ); centroids_buckets_[FindCentroid (key, centroids_, distance_fn_)].emplace_back (key, rid); }
接下来是查找,为了查找方便,加入一个新的帮手函数来找到最近的N个centroids :
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 auto FindNCentroids (const Vector &vec, const std::vector<Vector> ¢roids, VectorExpressionType dist_fn, size_t nprobe) -> std::vector<size_t > BUSTUB_ASSERT (nprobe <= centroids.size (), "Requested centroid count exceeds available centroids." ); std::vector<std::pair<double , size_t >> distances; distances.reserve (centroids.size ()); for (size_t i = 0 ; i < centroids.size (); ++i) { distances.emplace_back (ComputeDistance (vec, centroids[i], dist_fn), i); } std::partial_sort (distances.begin (), distances.begin () + nprobe, distances.end ()); std::vector<size_t > nearest_n (nprobe) ; for (size_t i = 0 ; i < nprobe; i++) { nearest_n[i] = distances[i].second; } return nearest_n; }
继续实现查找:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 auto IVFFlatIndex::ScanVectorKey (const std::vector<double > &base_vector, size_t limit) -> std::vector<RID> auto nearest_centroids = FindNCentroids (base_vector, centroids_, distance_fn_, probe_lists_); std::vector<std::pair<double , RID>> candidates; for (auto c : nearest_centroids) { for (const auto &[v, rid] : centroids_buckets_[c]) { candidates.emplace_back (ComputeDistance (base_vector, v, distance_fn_), rid); } } size_t ans_num = std::min (limit, candidates.size ()); std::partial_sort (candidates.begin (), candidates.begin () + ans_num, candidates.end (), [](const auto &a, const auto &b) { return a.first < b.first;}); std::vector<RID> ans (ans_num) ; for (size_t i = 0 ; i < ans_num; ++i) { ans[i] = candidates[i].second; } return ans; }
即可运行通过测试:
1 2 make -j8 sqllogictest ./bin/bustub-sqllogictest ../test/sql/vector.04-ivfflat.slt --verbose
正如之前讲的,因为IFFLAT算法只查找近邻几个cluster,为了效率牺牲了一些准确性 ,所以这里的测试又可能多次运行结果不一致,只要保证多组结果中有和标准答案里相同的情况,就应该是正确的实现了。
如果想更准确,可以增加构建的迭代次数,比如我从500增加到3000。但仍然会观察到结果不稳定,测试中的最后一个sql还是会偶尔出现错误的结果。虽然合理,但很难受。
接下来我改成K-means++初始化方法,把RandomSample改个名,改个实现即可:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 auto RandomInitialCentroids (std::vector<std::pair<Vector, RID>> &input, size_t k, VectorExpressionType dist_fn) -> std::vector<Vector> { if (k > input.size ()) { throw std::invalid_argument ("Sample size exceeds input size." ); } std::unordered_map<size_t , Vector> inputs; size_t n = input.size (); for (size_t i = 0 ; i < input.size (); ++i) { inputs[i] = input[i].first; } std::vector<Vector> centroids; size_t first = rand () % n; centroids.push_back (inputs[first]); inputs.erase (first); k -= 1 ; std::random_device rd; std::mt19937 gen (rd()) ; while (centroids.size () < k) { std::vector<double > weights; std::vector<double > vectors; for (auto &[idx, vec] : inputs) { double min_dist = std::numeric_limits<double >::max (); for (const auto ¢roid : centroids) { double d = ComputeDistance (vec, centroid, dist_fn); min_dist = std::min (min_dist, d); } weights.push_back (min_dist * min_dist); vectors.push_back (idx); } std::discrete_distribution<> dist (weights.begin (), weights.end ()); size_t next = vectors[dist (gen)]; centroids.push_back (inputs[next]); inputs.erase (next); } return centroids; }
这时候再去运行测试,会发现多次尝试都可获得正确结果,不再会得到错误的测试结果,即使迭代次数只有500。可见,更准确的初始中心方法对结果的提升还是巨大的。
Hierarchical Navigable Small Worlds 在实现HNSW之前,先实现一个基本组件 **NSW (Navigable Small Worlds)**。
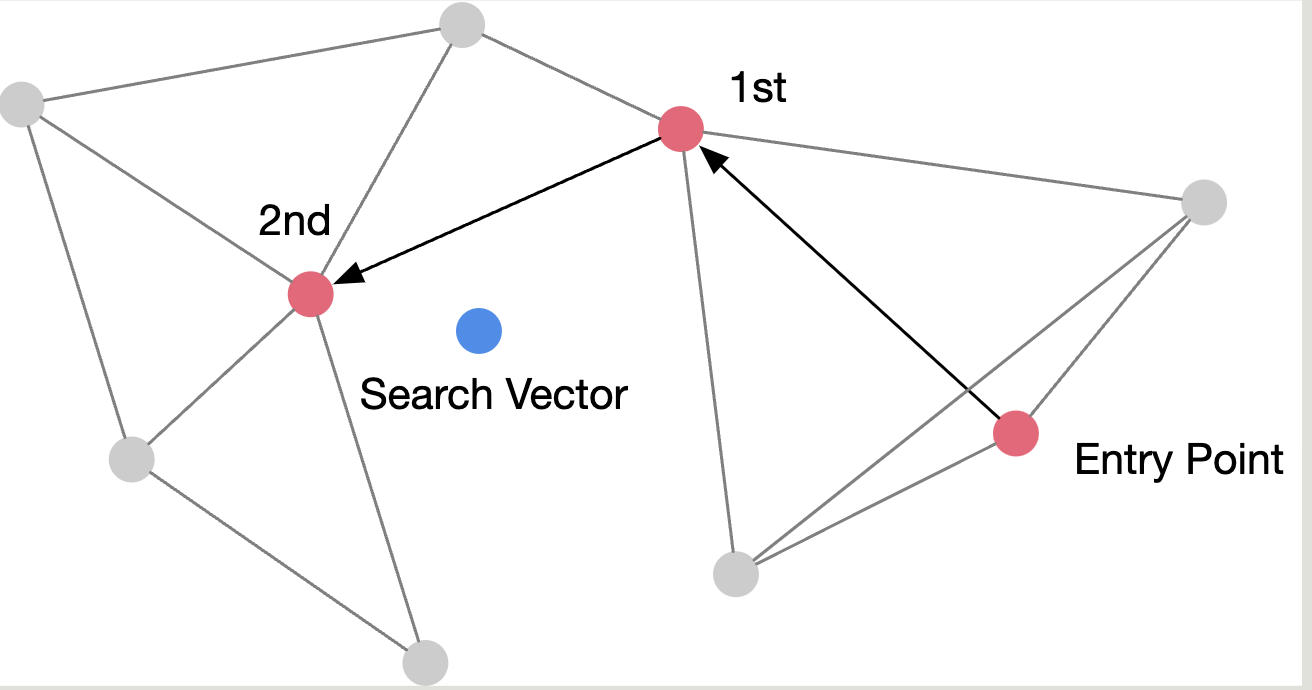
介绍 这个算法维护图中节点与近邻之间的连接,查找时从一个节点开始,不断判断其相邻节点是否与目标节点更近,并持续跳向更近的节点,直到找不到更近的节点。
蓝色节点 最近的节点,先随机从Entry Point 开始,计算其相邻节点是否更近,然后跳转到更近的1st节点 ,再同样的方式跳转到2nd节点 ,此时发现四周节点都更远,说明找到最近节点。
而构建则是类似,先查找最近邻的M个节点,然后插入并将最近邻的M个节点相连。
这个算法查找速度和内存消耗都大于IFFlat,但提升了查找精度 以及可以动态构建。当然,这中贪心算法也有很大的缺点,也就是很容易陷于局部最优 ,很依赖图构建的质量和初始点的选取。
也有解决局部最优的几个思路:
多起点搜索(multi-entry search) :从多个随机点开始,多次贪心搜索,取最优。beam search / best-first search :维护一个候选集合而非单一节点,跳更稳。随机跳跃 :加入一些概率性非贪心跳跃(如 Simulated Annealing 思想)。
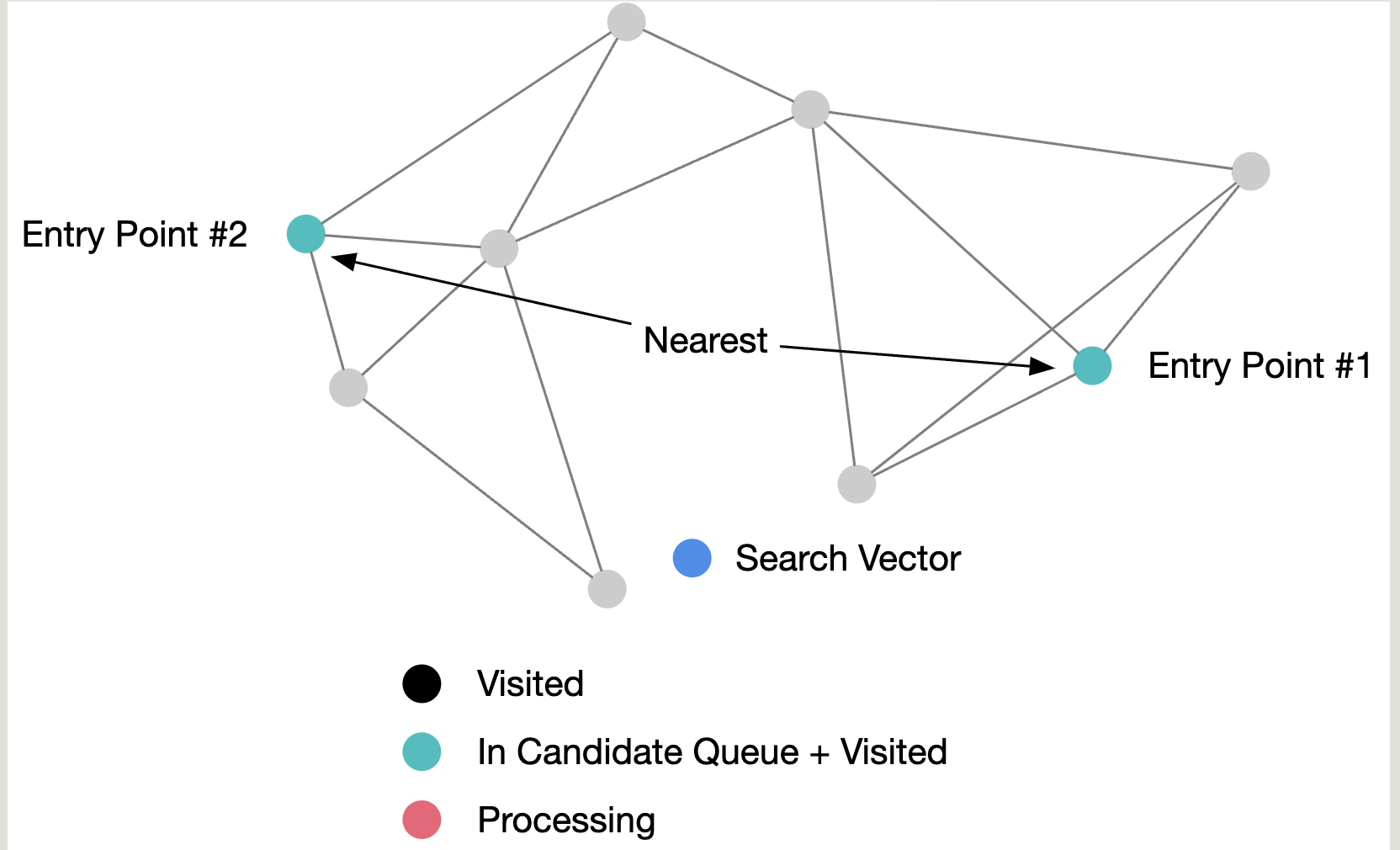
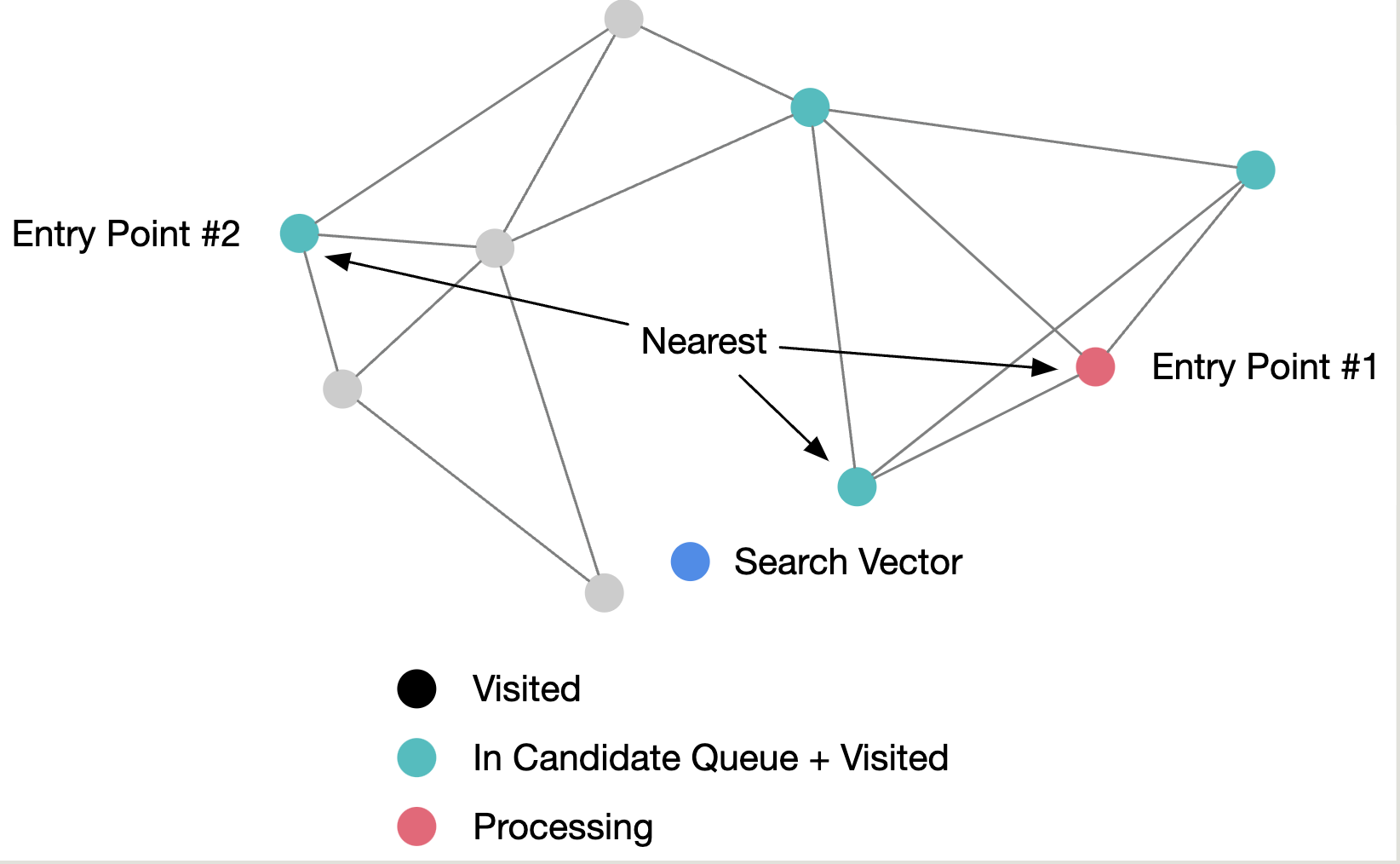
而这里我们也用了多起点搜索 和priority-queue 。
实现 我们的实现用了多起点➕best-first search 。
需要维护两个数据结构,一个priority-queue存放候选节点 ,记为C ;一个binary-heap存放最近的k个结果 ,记为W 。
C 和结果集合W 。C 和结果集合W 。而结果集合只保留最近的k个节点 。
再继续从候选集合C 中pop节点,直到所有候选节点的距离都要远于结构集合里节点的距离 。(注意要避免将已经遍历过的节点重复加入候选合集)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 auto NSW::RandomSample (size_t ef_construction) -> std::vector<size_t > auto vertice = in_vertices_; std::random_device rd; std::shuffle (vertice.begin (), vertice.end (), rd); size_t sample_size = std::min (ef_construction, vertice.size ()); return {vertice.begin (), vertice.begin () + sample_size}; } auto NSW::Insert (const std::vector<double > &vec, size_t vertex_id, size_t ef_construction, size_t m) auto entries = RandomSample (ef_construction); auto nearest = SearchLayer (vec, m, entries); AddVertex (vertex_id); for (size_t x : nearest) { auto &lists = edges_[x]; if (lists.size () == m_max_) { auto it = std::max_element ( lists.begin (), lists.end (), [&](size_t a, size_t b) { return ComputeDistance (vertices_[x], vertices_[a], dist_fn_) < ComputeDistance (vertices_[x], vertices_[b], dist_fn_); }); auto removed = *it; lists.erase (it); auto &rev_list = edges_[removed]; rev_list.erase (std::remove (rev_list.begin (), rev_list.end (), x), rev_list.end ()); } Connect (vertex_id, x); } }
运行测试会发现还是有不稳定的问题,有时候能返回正确结果,有时候返回错误结果。
解决局部最优最有效实用的方法还是HNSW,也是现在现代向量数据库如pgvector之类最主流的方法。
Hierarchical Navigable Small World 这部分则会基于NSW,实现Hierarchical Navigable Small World(层次化可导航小世界图) 高效向量近似最近邻搜索(ANN) 算法。
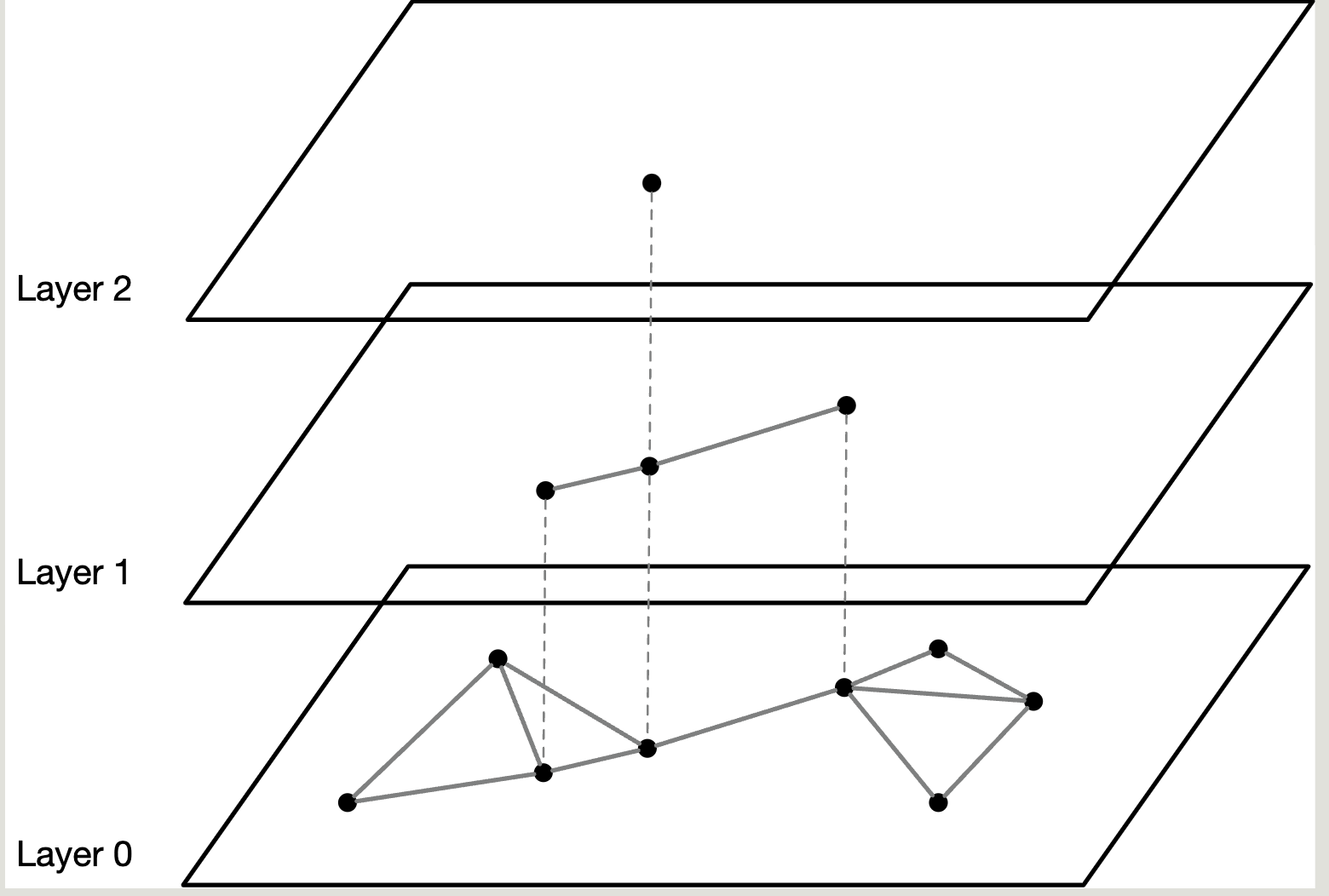
思路 这里基于Intuition介绍一下,其通过构建多层次的图结构来加速向量检索,即一堆向量建一个多层的“跳跃网络 ”。核心思路是:
分层组织 :将向量点随机划分到不同的层级。层数高的节点越稀疏 节点之间距离远 ,用于快速远距离跳跃;层级低的节点越密集 节点之间距离近 ,用于具体定位到精确节点。近邻连接 :在同一层,节点只连自己附近的点。并有少量的随机远距离连接。层次导航 :
在上层图中,节点稀疏且连接长距离,可以快速跳跃,找到查询向量的大致方向 。
在下层图中,节点密集且连接近邻,可以细致搜索,找到精确的最近邻 。
整体上,HNSW结合了局部聚集性 (找到最近邻)和全局跳跃性 (快速定位)两种特性,使得在海量向量数据中,也能用极少的跳跃快速找到目标。这种设计与跳表(Skip List) 非常相似。
玩过《都市天际线》应该很容易理解,HNSW的结构和城市路网很类似。
在城市中,建筑往往聚集成簇,比如住宅区 、商业区 、工业区 。每个簇内部建筑密集,但簇与簇之间距离较远,整体呈现出一种局部密集、整体稀疏 的结构。
如果使用最naive的“格子城 ”设计——所有道路宽度相同、网格均匀排布——那么远距离通行时,车辆需要经过大量路口,频繁停车等待,通行效率极低。而这就相当于NSW,当搜索初始节点和目标节点相距很远的时候,就要经过大量的“路口”才能找到最近节点,这大大降低了效率。
为了解决这个问题,城市路网设计引入了道路分级。比如,从居民区到工业区,会设计一条宽阔的高速路 ,通过尽量少的路口 直达目的地;而到了工业区附近,再通过高速辅路 下高速,进入工业区内部密集的小街道。这些小街道虽然路口密集、易堵车,但因为它们属于末端道路,不会影响城市高速主干道的整体通行效率。
HNSW的设计正是如此。
高层 (高速路):快速跳跃,减少跳转次数,快速接近目标区域。中层 (辅路):过渡连接,定位更精确的子区域。低层 (小街道):局部密集搜索,最终精准找到最近的节点。
高级层级负责远距离快速定位,低级层级负责细粒度的精确查找。 这就是HNSW结构与城市路网惊人相似之处。
现在举个例子,比如数据库里有这些向量:[1] [2] [3] [10] [11] [12] [50] [51] [52]
如果你查11附近的点,暴力法要每个都算一遍距离,超级慢。
但HNSW是:
先在高层,从比如50出发
发现11比50近,就跳到10
10周围是11、12,一下子找到最近的邻居!
跳几步就搞定了!而不是扫一遍。
(假设2层图)
1 2 3 1 ----- 10 ---- 50 Level 1 远距离连接,通行更快 \ / 2----3----11----12----51----52 Level 0 更密集连接,能走得更细
Level 1用于快速粗定位,Level 0用于精细局部搜索,很类似跳表。
实现 HNSW 的每一层相当于一个NSW。
查找 查找时从高层开始,向底层查找。
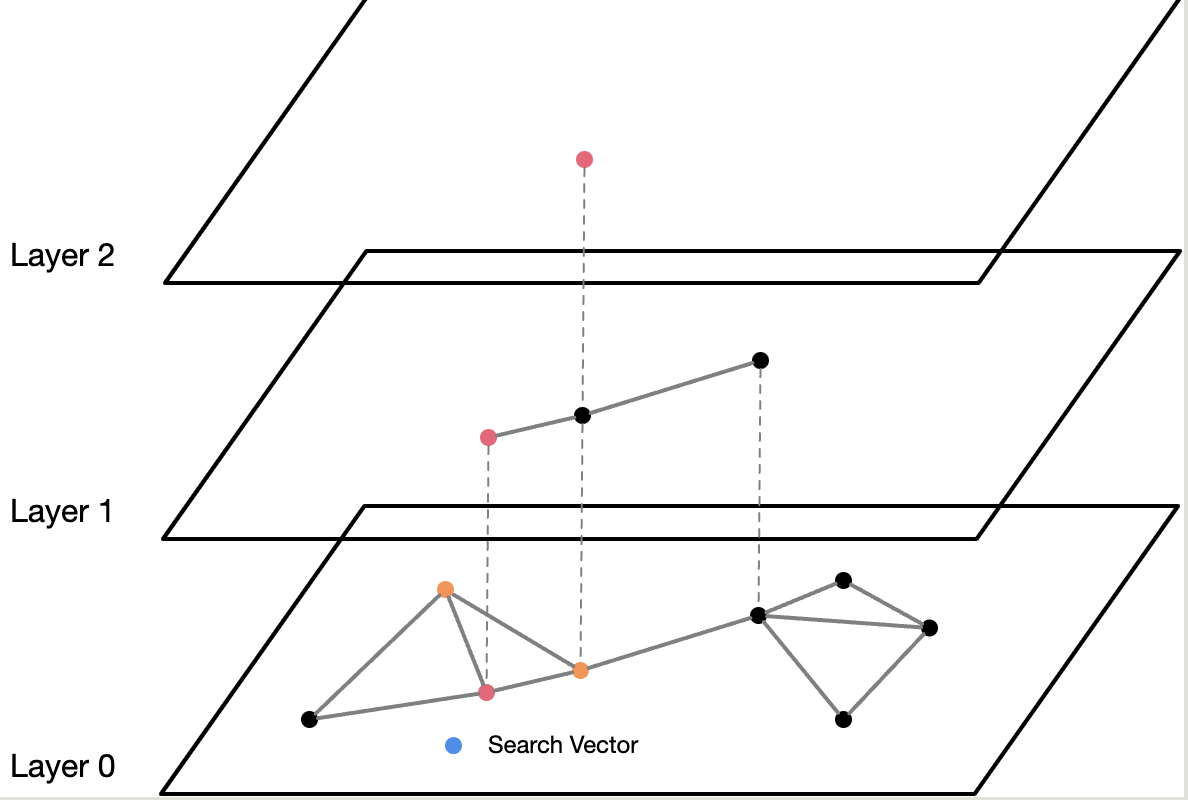
如图,先从 Layer 2 开始,找到最近邻节点后,以其为起始点,下到 Layer 1 继续查找最近邻点,找到后再进入 Layer 0 也就是最底层,查到最近邻的k个点。
重要的一点是,高层搜索时要用eof_search 作为搜索宽度,然后再用SearchNeighbor() 找出最近的节点,因为这样才能保持一个较宽的搜索宽度,使搜索更精确。
插入 插入节点首先必定要插入底层(类似跳表),因为底层要维护所有节点。并且根据一定的概率来判断是否要插入上层节点,插入层数遵循这样的公式:
$$
$\text{unif}(0, 1)$ 是一个$[0, 1)$的随机均匀分布。
外层加一个$-\ln$ 取其对数,其概率密度分布变成了$f(x) = e^{-x}$,即大的数概率小,小的数概率大 。这样就相当于高层建新节点的概率呈指数级下降。
$m_L$ 是一个可调参数。
最后再向下取整。
代码 查找最近邻:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 auto SelectNeighbors (const std::vector<double > &vec, const std::vector<size_t > &vertex_ids, const std::vector<std::vector<double >> &vertices, size_t m, VectorExpressionType dist_fn) -> std::vector<size_t > std::vector<std::pair<double , size_t >> distances; distances.reserve (vertex_ids.size ()); for (const auto vert : vertex_ids) { distances.emplace_back (ComputeDistance (vertices[vert], vec, dist_fn), vert); } std::sort (distances.begin (), distances.end ()); std::vector<size_t > selected_vs; selected_vs.reserve (vertex_ids.size ()); for (size_t i = 0 ; i < m && i < distances.size (); i++) { selected_vs.emplace_back (distances[i].second); } return selected_vs; }
搜索:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 auto HNSWIndex::ScanVectorKey (const std::vector<double > &base_vector, size_t limit) -> std::vector<RID> std::vector<size_t > vertex_ids; for (int l_idx = layers_.size () - 1 ; l_idx >= 1 ; l_idx--) { NSW &layer = layers_[l_idx]; if (vertex_ids.empty ()) { vertex_ids = layer.SearchLayer (base_vector, ef_search_, layer.RandomSample (1 , generator_)); } else { vertex_ids = layer.SearchLayer (base_vector, ef_search_, vertex_ids); } vertex_ids = SelectNeighbors (base_vector, vertex_ids, *vertices_, 1 , distance_fn_); } vertex_ids = layers_[0 ].SearchLayer (base_vector, limit > ef_search_ ? limit : ef_search_, vertex_ids); vertex_ids = SelectNeighbors (base_vector, vertex_ids, *vertices_, limit, distance_fn_); std::vector<RID> result; result.reserve (vertex_ids.size ()); for (size_t i = 0 ; i < std::min (limit, vertex_ids.size ()); ++i) { result.push_back (rids_[vertex_ids[i]]); } return result; }
插入新节点:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 void HNSWIndex::InsertVectorEntry (const std::vector<double > &key, RID rid) auto id = AddVertex (key, rid); size_t level = RandomLevel (); while (layers_.size () <= level) { layers_.emplace_back (*vertices_, distance_fn_, m_max_); } std::vector<size_t > vertex_ids; for (int l_idx = layers_.size () - 1 ; l_idx > static_cast <int >(level); l_idx--) { NSW &layer = layers_[l_idx]; if (vertex_ids.empty ()) { vertex_ids = layer.SearchLayer (key, 1 , layer.RandomSample (1 , generator_)); } else { vertex_ids = layer.SearchLayer (key, 1 , vertex_ids); } vertex_ids = SelectNeighbors (key, vertex_ids, *vertices_, 1 , distance_fn_); } for (int l_idx = level; l_idx >= 0 ; l_idx--) { NSW &layer = layers_[l_idx]; if (vertex_ids.empty ()) { vertex_ids = layer.RandomSample (1 , generator_); } layer.Insert (key, id, ef_construction_, m_, vertex_ids); } } auto HNSWIndex::RandomLevel () -> size_t std::uniform_real_distribution<double > distrib (0.0 , 1.0 ) ; double u = distrib (generator_); int level = static_cast <int >(std::floor (-std::log (u) * m_l_)); return level; }
即可通过测试。
整体来说如果做过Project 3 leaderboard部分,就不算难,几个三种向量索引如果理解了,实现也是很简单,但原版讲义还是有很多可以优化的部分。